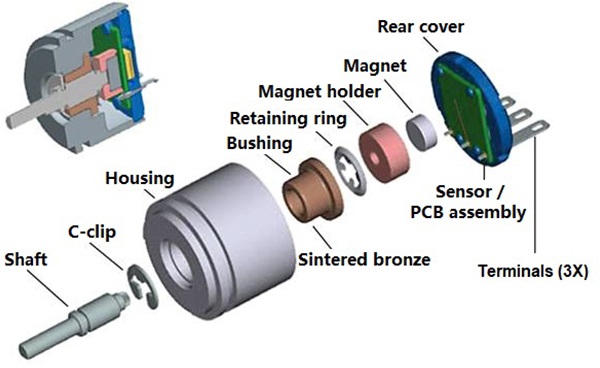
Hvis du har mulighed for at skille en magnetisk roterende encoder ad, vil du normalt se en indvendig struktur som den, der er vist ovenfor. Den magnetiske koder er sammensat af en mekanisk aksel, en skalstruktur, en PCB-samling for enden af koderen og en lilledisk magnetroterer med akslen for enden af den mekaniske aksel.
Hvordan måler den magnetiske encoder rotationspositionsfeedbacken?
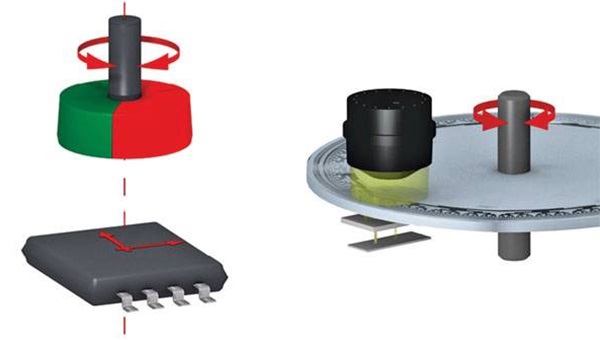
Hall-effekt: Frembringelsen af potentialforskel over en leder, der fører elektrisk strøm, når et magnetfelt påføres i retningen vinkelret på den strøm, der flyder.
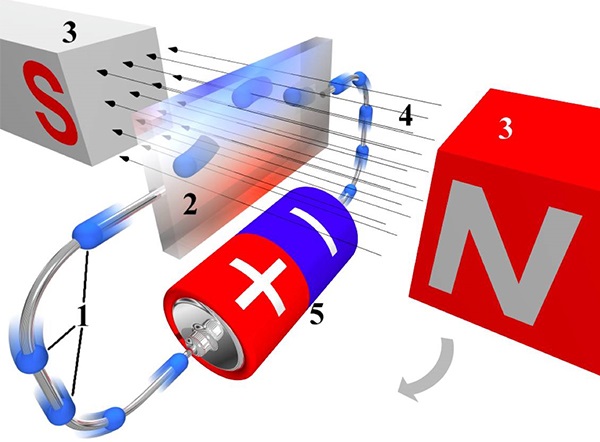
Hvis det magnetiske felt, der påføres lederen, roteres i retningen vist med pilen ovenfor med strømningsvejen som akse, vil Hall-potentialforskellen ændre sig på grund af ændringen af vinklen mellem magnetfeltet og lederen, og ændringstendensen for potentialforskellen er en sinusformet kurve. Derfor, baseret på spændingen på begge sider af den strømførende leder, kan rotationsvinklen for magnetfeltet beregnes omvendt. Dette er den grundlæggende arbejdsmekanisme for en magnetisk encoder ved måling af rotationspositionsfeedback.
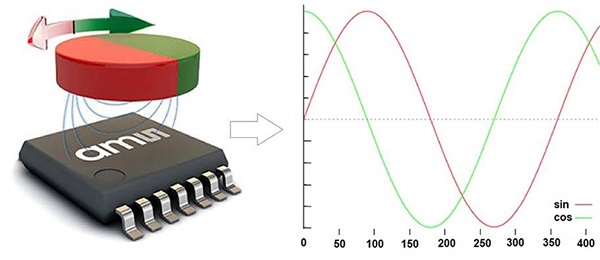
I lighed med princippet om, at resolveren bruger to sæt indbyrdes vinkelrette udgangsspoler, kræves der også to (eller to par) hallinduktionselementer med indbyrdes vinkelrette strømretninger i den magnetiske koder for at sikre den unikke overensstemmelse mellem magnetfeltets roterende position og udgangsspændingen (kombination).
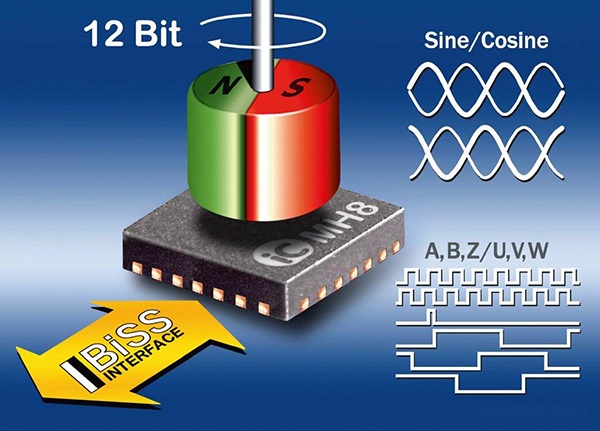
I dag har Hall-sensorer (chips), der anvendes i magnetiske indkodere, generelt en høj grad af integration, som ikke kun integrerer hall-halvlederkomponenter og relaterede signalbehandlings- og reguleringskredsløb, men også integrerer forskellige typer signaludgangsmoduler, såsom sinus- og cosinusanaloge. signaler, firkantede digitale niveausignaler eller buskommunikationsudgangsenheder.
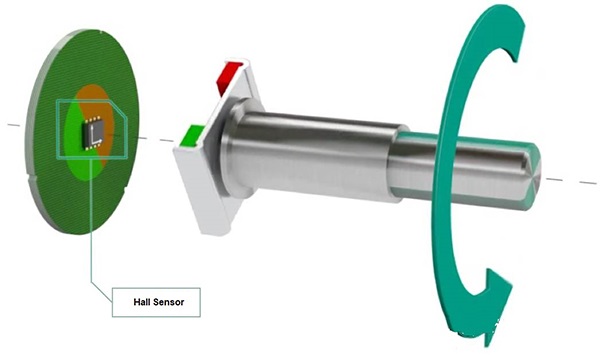
På denne måde skal du installere en permanent magnet som sintret neodymmagnet, der genererer et magnetfelt for enden af encoderens roterende aksel, placer hallsensorchippen nævnt ovenfor på et printkort og nærmer dig den permanente magnet for enden af encoderen aksel i henhold til visse krav (retning og afstand).
Ved at analysere spændingssignalet fra hall-sensoren gennem printkortet, kan enkoderrotorens roterende position identificeres.
Strukturen og arbejdsprincippet for den magnetiske encode bestemmer de særlige krav til denne permanente magnet, f.eks. magnetmateriale, magnetform, magnetiseringsretning osv. Normaltdiametralt magnetiseret neodymmagnetdisk er den bedste magnetmulighed. Ningbo Horizon Magnetics har erfaring med at levere til mange producenter af magnetiske koder med nogle størrelser afdiametrale Neodymium disk magneter, D6x2,5 mm og D10x2,5 mm diametriske neodymmagneter, hvoraf de mest populære modeller er.
Det kan ses, at sammenlignet med den traditionelle optiske encoder behøver den magnetiske encoder ikke en kompleks kodedisk og lyskilde, antallet af komponenter er mindre, og detektionsstrukturen er enklere. Desuden har Hall-elementet i sig selv også mange fordele, såsom fast struktur, lille størrelse, lav vægt, lang levetid, vibrationsbestandighed, ikke bange for støv, olie, vanddamp og salttåge forurening eller korrosion.
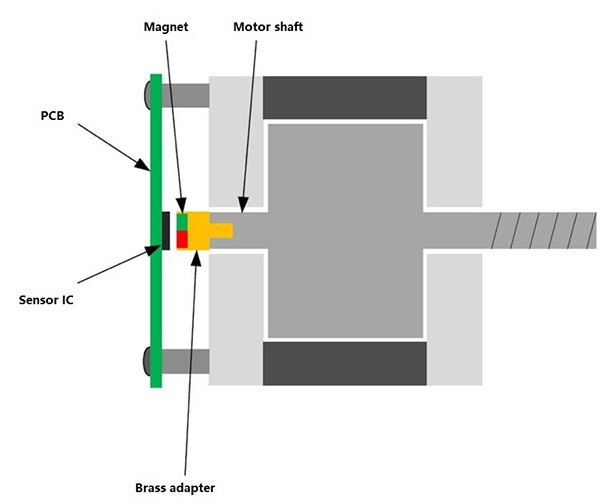
Når den magnetiske encoder-teknologi anvendes på rotationspositionsfeedback for den elektriske motor, vil densintret NdFeB magnetcylinderaf den magnetiske encoder kan installeres direkte ved enden af motorakslen. På denne måde kan det eliminere overgangskoblingslejet (eller koblingen), der kræves ved brug af den traditionelle feedback-encoder, og opnå kontaktløs positionsmåling, hvilket reducerer risikoen for encoderfejl (eller endda beskadigelse) på grund af vibrationen fra den mekaniske aksel under driften af den elektriske motor. Derfor hjælper det med at forbedre stabiliteten af elektrisk motordrift.
Indlægstid: 21-jul-2022