Med den kraftige udvikling af den elektroniske industri ændres positionsdetekteringen af nogle strukturelle komponenter langsomt fra den oprindelige kontaktmåling til den berøringsfrie måling gennemHall positionssensor og magnet. Hvordan kan vi vælge en passende magnet i henhold til vores produkter og struktur? Her laver vi nogle simple analyser.
Først skal vi bestemme magnetmaterialet. På nuværende tidspunkt er samarium koboltmagnet og neodymjernbor meget brugt i hallpositionssensorer. Den største forskel mellem de to magneter er, at baseret på samme volumen er NdFeB-magneter stærkere end samarium-koboltmagneter; den termiske udflugt af samarium-kobolt er mindre end for Nd-Fe-B; oxidationsmodstanden for samariumkobolt er stærkere end Nd-Fe-B, men generelt er der en belægning på ydersiden af magneten, som kan løse problemet med oxidation; samarium-koboltmagneten har bedre temperaturmodstand end NdFeB-magnet, men temperaturmodstandsværdien for begge magnetmaterialer kan nå mere end 200 ℃. Derfor, når vi vælger typen af magnet, bør vi evaluere den i kombination med omkostningsydelse, arbejdstemperatur og arbejdsmiljø. Generelt kan NdFeB bruges mere, hovedsagelig fordi det har de bedste magnetfeltegenskaber. Men når du arbejder i et bredt temperaturområde, anbefales det at vælge samarium koboltmagnet på grund af dens lille termiske drift.
Derudover skal vi bestemme nogle grundlæggende parametre for magneten. I henhold til testpositionsinformationen og objektets bevægelsesretning bestemmer vi, om magnetens magnetiseringsretning er diametral eller aksial. Derudover bestemmes det, om der skal vælges enfirkantet magneteller acylinder magneti henhold til installationsstrukturen. Selvfølgelig skal vi nogle gange tilpasse magnetens form i henhold til strukturen. Der er en anden kravfaktor om magnetflux, som altid har været vores bekymring i magnetvalg. Faktisk er vi nødt til at analysere det i følgende to aspekter:
1. Den magnetiske feltstyrke induceret af selve hallpositionssensoren og det inducerede magnetfeltområde i hver retning vil være tydeligt markeret i sensordatabogen.
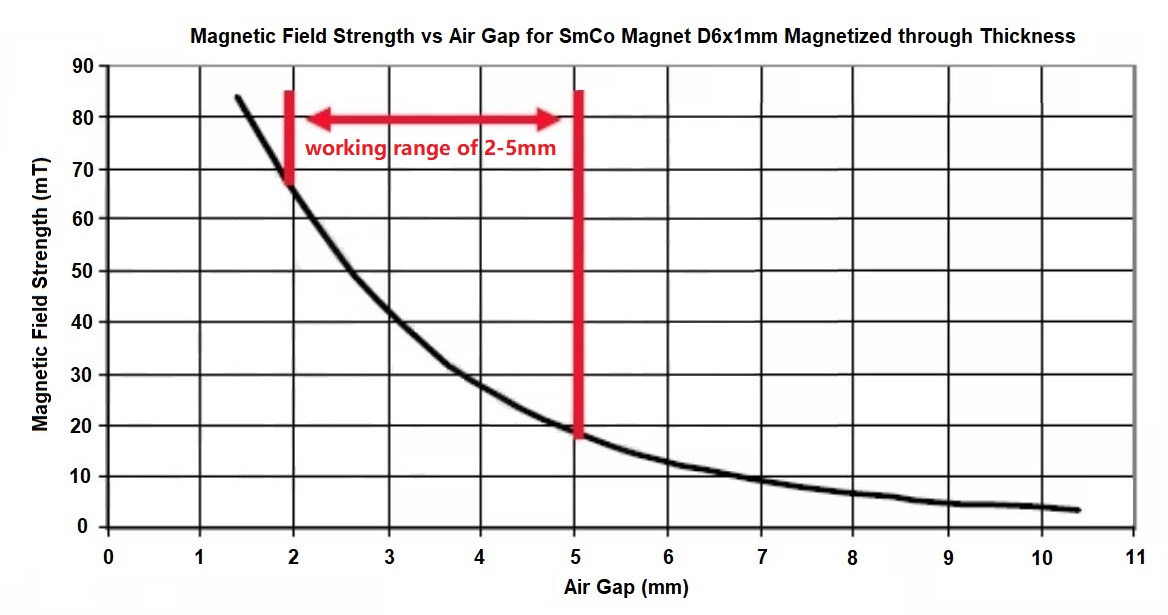
2. Afstanden mellem magneten og selve sensoren bestemmes generelt af produktstrukturen. I henhold til ovenstående to aspekter og magnetfeltændringskurven i figuren nedenfor som et eksempel, kan vi bestemme magnetfeltstyrken af den nødvendige magnet.
Endelig skal vi forstå, at det ikke betyder, at så længe magnetfeltet falder på sensorens rækkeviddekrav, kan magneten være så langt væk fra sensoren. Selvom sensoren selv har kalibreringsfunktion, skal vi forstå, at når magneten er for langt fra sensoren, er fordelingen af selve magnetfeltet vanskelig at sikre linearitet eller tæt på linearitet. Det betyder, at med positionsændringen og den ikke-lineære fordeling af selve magnetfeltet, vil sensormålingen blive kompleks, og kalibreringen bliver meget kompleks, så produktet ikke har reduktionsmuligheder.
Ovenstående er blot en simpel analyse af magnetvalg i Hall-sensorapplikationer. Vi håber, det vil være nyttigt for dig. Hvis du har andre spørgsmål under udviklingsprocessen, så kontakt os venligst,Ningbo Horizon Magnetics. Vi kan kommunikere yderligere og give dig teknisk support.
Indlægstid: 12-aug-2021